Box-Bot

Würdest du gern einen einfachen Roboter bauen? Dann hast du ihn mit dem Box-Bot gefunden und steigst in die Welt der Pi-basierten Robotik ein.
Hinweis: Bei diesem Projekt muss man sehr viel programmieren. Bei einigen Schritten wird dir vorgeschlagen, .txt-Dateien mit dem erforderlichen Code herunterzuladen, den du dann abtippen oder kopieren und einfügen kannst.
Schritt 1: Wähle dein Gehäuse
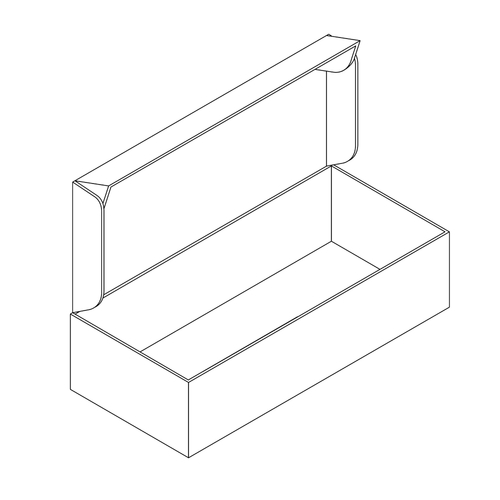
Ein Karton ist ein guter Roboter-Körper, aber der Raspberry Pi, das Batteriegehäuse und die Kabel müssen hineinpassen.
Wenn du nicht willst, dass der Roboter an einem Kabel hängt, brauchst du Platz für zusätzliche Teile.
Schritt 2: Motoren und Räder anfügen
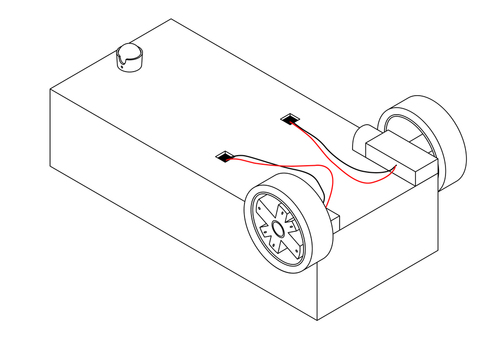
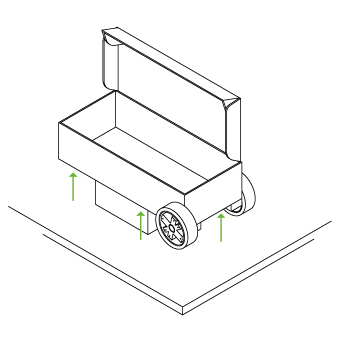
Befestige die Motoren, Räder und die Kugelrolle auf der Unterseite der Kiste, sichere sie mit doppelseitigem Schaumdichtband. Die Räder sitzen vorne, und die Kugelrolle ist hinten.
Schneide zwei kleine Löcher in die Unterseite der Kiste, damit du die Motorenkabel durchfädeln kannst, wie auf der Illustration gezeigt.
Schritt 3: Schließe das Motor Controller Board an
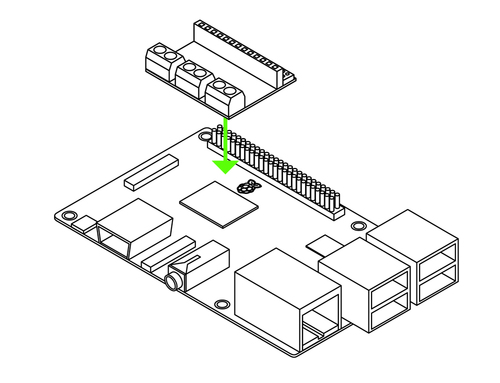
Das Motor Controller Board wird mit den GPIO-Pins des Raspberry Pi 3 wie gezeigt verbunden.
Hast du ein anderes Pi-Modell mit abweichender Pin-Anzahl, schau auf die Cambridge Raspberry Jam Webseite, um die Details zu erhalten.
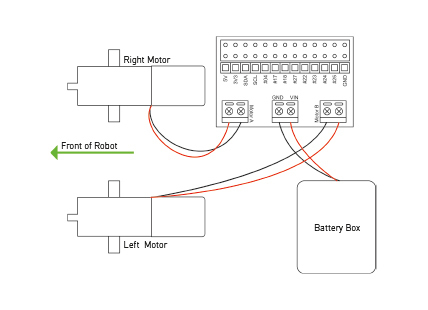
Schritt 4: Verdrahten
Sorge dafür, dass die Batterien drin sind, das Batteriegehäuse aber abgeschaltet ist. Die Kabel des Batteriegehäuses müssen, wie gezeigt, verbunden werden.
Verbinde den rechten Motor mit „Motor A“ auf dem Motor Controller Board, den linken Motor mit „Motor B“.
Vorerst ist egal, welcher Draht in welchem Anschluss steckt.
Schritt 5: Die Räder programmieren
Die GPIO-Pins des Raspberry Pi steuern die Räder. Wir nutzen GPIOs 9 und 10, um Motor A (Motor rechts) zu steuern, für Motor B (Motor links) GPIOs 7 und 8.
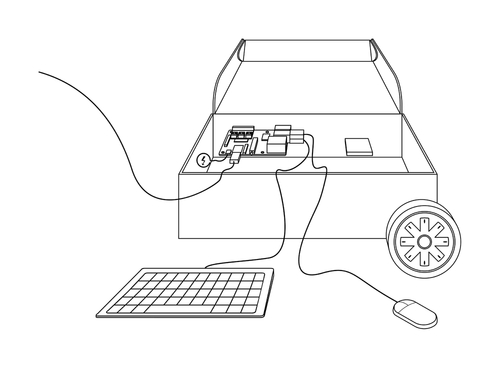
Hänge den Pi an Strom, Bildschirm, Maus und Tastatur und gib folgende Befehle in ein Terminal-Fenster ein, um ein Verzeichnis für den Code des Roboters zu erstellen:
cd ~ mkdir EduKitRobotics cd EduKitRobotics
Tippe dann nano 3-motors.py, um ein neues Python-Script im Nano-Editor zu erstellen. Gib jetzt diesen Code ein. Wenn du den Code eingegeben hast, drücke Strg+X, dann Y, gefolgt von Eingabe, um die Datei zu speichern.
Schritt 6: Teste die Räder
Während dein Roboter noch an Maus, Tastatur und Monitor hängt, schalte das Batteriegehäuse ein. Halte den Bot fest, damit die Räder nicht auf dem Boden sind, und gib ins Terminal-Fenster sudo python3 3-motors.py ein (um das Python-Script zu starten).
Beide Räder sollten eine Sekunde lang vorwärts laufen. Dreht sich ein Rad in die falsche Richtung, vertausche die beiden Drähte, die den Motor des Problemrads mit dem Motor Controller Board verbinden.
Sobald beide Räder richtig laufen, kann dein Bot geradeaus vorwärts fahren!
Schritt 7: Lenkung

Jeder deiner Motoren nutzt zwei GPIO-Pins deines Pi. Schaltet man diese Pins in verschiedenen Kombinationen aus und ein, kann der Roboter sich vorwärts, rückwärts, nach rechts und links bewegen. Schreibe ein weiteres Python-Script in Nano, indem du Folgendes in ein Terminal-Fenster eingibst:
cd ~/EduKitRobotics nano 4-driving.py
Gib den folgenden Code ein. Anschließend drücke wieder Strg+X, dann Y, gefolgt von Eingabe, um die Datei zu speichern.
Gib Folgendes in ein Terminal-Fenster ein, um den Code auszuführen (dein Roboter wird sich nicht bewegen, aber den Code nach Fehlern durchsuchen):
sudo python3 4-driving.py
Schritt 8: Bewegung
Um den Roboter zu bewegen, änderst du den Code, den du im vorigen Schritt eingegeben hast. Füge folgende Zeilen an, gleich vor der letzten Zeile des Codes, in der es GPIO.cleanup() heißt:
Forwards()
time.sleep(1)
Backwards()
time.sleep(1)
StopMotors()
Jetzt führe das Script mit python3 4-driving.py erneut aus.
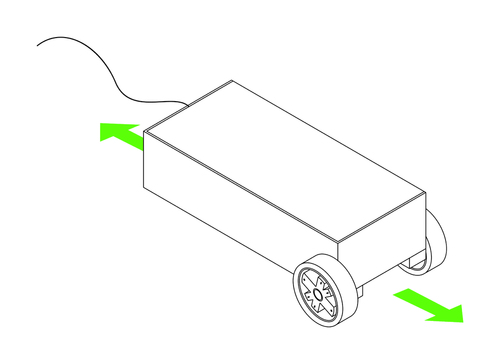
Dein Roboter wird sich eine Sekunde vorwärts bewegen, dann eine Sekunde rückwärts.
Sorge dafür, dass dein Raspberry-Pi-Stromkabel lang genug ist.
Schritt 9: Selbst steuern
Um nach links und rechts zu steuern, passt du den Code erneut an. Füge deinen driving.py Code ein, den du hier findest.
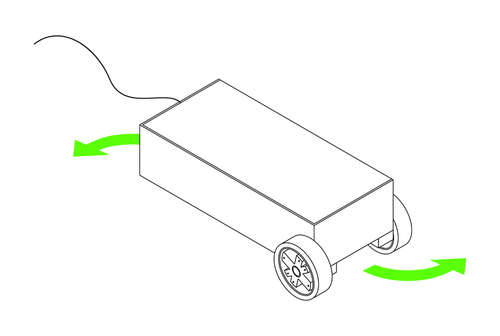
Führe den Code wieder aus (mit Python3 4-driving.py). Dein Bot sollte sich in Schlangenlinien bewegen.